|
�����
|
2019-06-03 21:39:43, ��ȸ�� : 947 |
- Download #1 : Tesor_II_1.jpg (49.2 KB), Download : 5

II-1 �Ϲ� ��ǥ��� Tensor
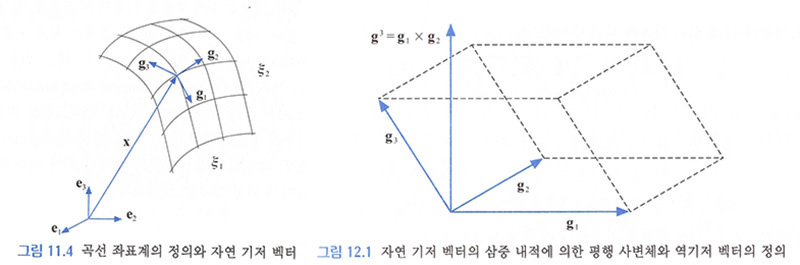
a) 11.1 General coordinate(�Ϲ� ��ǥ��) <- �� 11.4 ����
∘ Cartesian coordinates(��ǥ��): 𝐱1= x, 𝐱2= y, 𝐱3= z, 𝐮 = 𝑢1𝐞1 + 𝑢2𝐞2 + 𝑢3𝐞3
∘ Cylindrical coordinates(���� ��ǥ��): 𝜉1= 𝑟, ��2= 𝜃, 𝜉3= 𝑧, 𝐱1= 𝑟 cos𝜃, 𝐱2 = 𝑟 sin𝜃, x3 = 𝑧
∘ Sphrical coordinates(�� ��ǥ��): 𝜉1= 𝜌, 𝜉2= 𝜃, 𝜉3= 𝜙, 𝐱1= 𝜌 sin𝜃 cos𝜙, 𝐱2= 𝜌 sin𝜃 sin𝜙, 𝐱3= 𝜌 cos𝜃
∘ Curviinear coordinates(� ��ǥ��) �� general coordinate(�Ϲ� ��ǥ��)�� ��Ī�DZ ��.
�ٸ� ��ǥ���� �� Ư���� reference point(������)�� ������ Cartesian ��ǥ���� ������ ���� ������� ��ġ���� �������ϴ�.
curvilinear ��ǥ��� global coordinate(���� ��ǥ��)�� Cartesian ��ǥ��� �� local coordinate(���� ��ǥ��)��� �θ��ϴ�.
�� ������ ������ Cartesian ��ǥ�迡�� ���� �Ÿ���ŭ ������ ���������� �մ� vector�� ��ġ vector 𝐱 ��� ǥ���մϴ�.
�� ������ curvilinear ��ǥ��� ��ǥ���� components(����)�� ���� ����� ������ �˴ϴ�.
b) 11.2 �Ϲ� ��ǥ��(� ��ǥ��)������ ǥ���
∘ �Ϲ� ��ǥ���� vector 𝐮 = 𝑢𝑖 𝐠𝑖 = 𝑢𝑖 𝐠𝑖 <- �� �Ϲ� tensor�� �ߺ������� �ݵ�� ���� �Ʒ��� �����ϵ��� �ؾ� �մϴ�. [11.2.2,5]
𝐮 = 𝑢𝑖 𝐠𝑖 = 𝑢1𝐠𝑖 + 𝑢2𝐠2 + 𝑢3𝐠3 <- 𝑢𝑖: contravariant component(�ݺ� ����), 𝐠𝑖: natural basis(�ڿ� ����) vector [11.2.3]
𝐮 = 𝑢𝑖 𝐠𝑖 = 𝑢1𝐠1 + 𝑢2𝐠2 + 𝑢3𝐠3 <- 𝑢𝑖: covariant component(���� ����), 𝐠𝑖: reciprocal basis(������) vector [11.2.4]
∘ 2�� tensor ǥ���: ������ 4������ ǥ���� �� �ֽ��ϴ�.
𝐀 = 𝐴𝑖𝑗 𝐠𝑖 ⊗ 𝐠𝑗 = 𝐴𝑖𝑗 𝐠𝑖 ⊗ 𝐠𝑗 = 𝐴𝑖,𝑗 𝐠𝑖 ⊗ 𝐠𝑗 = 𝐴𝑖,𝑗 𝐠𝑖⊗ 𝐠𝑗 <- contravant(�ݺ�), covariant(����), mixed(ȥ��) ���� [11.2.6-8]
c) 11.3 General(�Ϲ�) tensor�� ����
∘ Tanspose(��ġ):
symmetric tensor 𝐀T = (𝐴𝑖𝑗)T 𝐠𝑖 ⊗ 𝐠j = 𝐴𝑗𝑖 𝐠𝑖 ⊗ 𝐠j = 𝐴𝑖𝑗 𝐠j ⊗ 𝐠𝑖, (𝐴𝑖𝑗)T = 𝐴𝑗𝑖, (𝐴𝑖𝑗)T = 𝐴𝑗𝑖, (𝐴𝑖,j)T = 𝐴j,𝑖 [11.3.1,2]
symmetric tensor: If 𝐀T = 𝐀, then 𝐀: sym𝐀 <- square matrix
skew-symetric(�ݴ�Ī) tensor: If 𝐀T = -𝐀, then 𝐀: skew𝐀 <- square matrix [11.3.3]
𝐀 = sym𝐀 + skew𝐀, sym𝐀 = 1/2 (𝐀 + 𝐀T), skew𝐀 = 1/2 (𝐀 - 𝐀T) <- Toeplitz decomposition 'Symmetric matrix'[link]
∘ ������ ����: ������ ����(basis)�� ���� ����(component) ���� ����
ex1) 𝐀 - 𝐁 = (𝐴𝑖𝑗 - 𝐵𝑖𝑗) 𝐠𝑖 ⊗ 𝐠𝑗 = 𝑇𝑖𝑗 = 𝐓, ex2) 𝐀 - 𝐁 = (𝐴𝑖,𝑗 - 𝐵𝑖,𝑗) 𝐠𝑖 ⊗ 𝐠𝑗 = 𝑇𝑖,𝑗 = 𝐓 [11.4.4,5]
d) 11.5 General tensor�� ���뼺: �� ��ǥ�迡 ������ ���� ǥ���� �����ϹǷ�, Einstein�� ���� �Ϲ� ��뼺 ����(GR)�� Ȱ��Ǿ���.
Cartesian ��ǥ�迡��: ex) velocity 𝐯 = 𝑣𝑖𝐞𝑖, 𝑣𝑖 = 𝑎𝑖𝑡, 𝑣𝑖𝐞𝑖 = 𝑎𝑖𝐞𝑖𝑡 �� 𝐯 = 𝐚𝑡 <- 𝐚: acceleration, 𝑡: time [11.5.1,4]
General ��ǥ�迡��: ex) velocity 𝐯 = 𝑣𝑖𝐠𝑖, 𝑣𝑖 = 𝑎𝑖𝑡, 𝑣𝑖𝐠𝑖 = 𝑎𝑖𝐠𝑖𝑡 �� 𝐯 = 𝐚𝑡 <- 𝐚: acceleration, 𝑡: time [11.5.2,5]
II-2 �Ϲ� ��ǥ�迡���� ����
a) 12.1 Inner product(����)
∘ Metric tensor: 𝑔𝑖𝑗 �� 𝐠𝑖 ∙ 𝐠𝑗; If 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗, then 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 𝑔𝑖𝑗 [12.1.6]
metric tensor [𝑔𝑖𝑗] =
⌈ 𝑔11 𝑔12 𝑔13 ⌉
�� 𝑔21 𝑔22 𝑔23�� (𝑖,𝑗 = 1,2,3) [12.1.7]
⌊ 𝑔31 𝑔32 𝑔33 ⌋
∘ Kronecker delta: 𝛿𝑖𝑗 �� 𝐠𝑖 ∙ 𝐠𝑗 = {0 (𝑖��𝑗); 1 (𝑖=𝑗)}; If 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠j, then 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 𝛿𝑖𝑗 = 𝑎𝑖𝑏i <- index ��ȯ (j��i of 𝑏) [12.1.11,12]
∘ Reciprocal(��) metric tensor: 𝑔𝑖𝑗 �� 𝐠𝑖 ∙ 𝐠𝑗; If 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗, then 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏j 𝑔𝑖𝑗 [12.1.13,14]
∘ Identity(����) tensor: 𝐈 = 𝛿𝑖𝑗 𝐠𝑖 ⊗ 𝐠𝑗 = 𝐠𝑖 ⊗ 𝐠𝑖, 𝐈 = 𝐈T = 𝛿𝑗𝑖 𝐠𝑖 ⊗ 𝐠𝑗 = 𝐠𝑗 ⊗ 𝐠𝑗 �� 𝐈 = 𝐠𝑖 ⊗ 𝐠𝑖 = 𝐠𝑖 ⊗ 𝐠𝑖 [12.1.15-17]
∘ Index ��ȣ∙��ġ �ٲٱ�: �� metric tensor/reciprocal metric tensor�� ������ �ִ� index�� ��ȣ�� ��ġ�� ���ÿ� �ٲ�.
𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗 = 𝑎𝑖𝑏𝑗 𝑔𝑖𝑗 = 𝑎𝑖𝑏i, 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗 = 𝑎𝑖𝑏𝑗 𝛿𝑗𝑖 = 𝑎𝑖𝑏i, 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗 = 𝑎𝑖𝑏𝑗 𝛿𝑖𝑗 = 𝑎𝑖𝑏𝑖, 𝑎𝑖𝑏𝑗 𝐠𝑖 ∙ 𝐠𝑗 = 𝑎𝑖𝑏𝑗 𝑔𝑖𝑗 = 𝑎𝑖𝑏𝑖, 𝐚 ∙ 𝐛 = 𝑎𝑖𝑏𝑗 = 𝑎𝑖𝑏𝑗 [12.1.24-28]
b) 12.2 Inner product(����) ����
∘ Basis(����) vector�� ��ȯ: 𝐠𝑖 = 𝑔𝑖𝑗 𝐠𝑗, 𝐠𝑖 = 𝑔𝑖𝑗 𝐠𝑗 [12.2.1,2]
∘ Metric tensor �����: [𝑔𝑖𝑗] = [𝑔𝑖𝑗]-1 �� 𝑔𝑖𝑗 ∙ 𝑔𝑖𝑗 = 𝐠𝑖 ∙ 𝐠𝑗 ∙ 𝐠𝑖 ∙ 𝐠𝑗 = 𝐠𝑖 ∙ 𝐠𝑗 ∙ 𝐠𝑗 ∙ 𝐠𝑖 = 𝛿𝑖𝑗 𝛿𝑗𝑖 = 𝐈 [12.2.6-8]
∘ Trace(�밢��): tr𝐀 = 𝐀 : 𝐈 �� 𝐴𝑖,𝑖, tr(𝐀2) = tr(𝐀 ∙ 𝐀) = 𝐀 : 𝐀 = 𝐴𝑖,𝑗𝐴j,𝑖, (tr𝐀)2 = tr(𝐀) tr(𝐀) = 𝐴𝑖,𝑖 𝐴𝑗,𝑗 [12.2.12-14]
∘ Vector�� ũ��: 𝐧 = 𝑛𝑖 𝐠𝑖�� ũ�� �� ��𝐧��= �� (𝐧 ∙ 𝐧) = �� (𝑛𝑖 𝐠𝑖 ∙ 𝑛𝑗 𝐠𝑗) = �� (𝑛𝑖𝑛𝑗𝑔𝑖𝑗) = �� (𝑛i𝑛𝑗), �� ��𝐧��= �� (𝐧 ∙ 𝐧) = �� (𝑛i𝑛i) [12.2.16-18]
∘ Basis(����) vector�� ũ��: ��𝐠𝑖��= �� (𝐠𝑖̄ ∙ 𝐠𝑖̄) = �� 𝑔𝑖̄𝑖̄, ��𝐠𝑖��= �� (𝐠𝑖̄ ∙ 𝐠𝑖̄) = �� 𝑔𝑖̄𝑖̄ <- �� 𝑖̄ : �ߺ�����(dummy index) ������ ǥ����. [12.2.19-24]
ex) ���� ��ǥ���� �ڿ� ���� vector ũ�⡫𝐠𝑖���� ���Ͻÿ�. ◂
��𝐠1��= �� (𝐠1 ∙ 𝐠1) = �� 𝑔11, ��𝐠2��= �� (𝐠2 ∙ 𝐠2) = �� 𝑔22, ��𝐠3��= �� (𝐠3 ∙ 𝐠3) = �� 𝑔33 ▮ [12.2.25]
c) 12.3 Tensor component(����) ��ȯ
∘ Tensor ���� ���ϱ�: ���ϴ� ������ basis vector�� tensor�� dot product�� ��. <- 1�� tensor: 1ȸ, 2�� tensor: 2ȸ
ex1) 𝐮 ∙ 𝐠𝑗 = 𝑢𝑖 𝐠𝑖 ∙ 𝐠𝑗 = 𝑢𝑖𝛿𝑖𝑗 = 𝑢𝑗, ex2) 𝐠𝑘 ∙ 𝐀 ∙ 𝐠𝑙 = 𝐠𝑘 ∙ (𝐴𝑖𝑗 𝐠𝑖 ⊗ 𝐠𝑗) ∙ 𝐠𝑙 = 𝐴𝑖𝑗 (𝐠𝑘 ∙ 𝐠𝑖)(𝐠𝑗 ∙ 𝐠𝑙) = 𝐴𝑖𝑗 𝑔𝑘𝑖 𝑔𝑗𝑙 = 𝐴𝑘𝑙 [12.3.1,3]
∘ Tensor �����ϱ�: tensor�� ���о� �˷��� ���� ���� basis vector�� ���Ͽ� tensor�� ȸ���� �� �ֽ��ϴ�.
ex1) 𝑢𝑗 (= 𝐮 ∙ 𝐠𝑗)�� �˸�, 𝑢j 𝐠𝑗 = 𝐮; ex2) 𝑢𝑗 (= 𝐮 ∙ 𝐠𝑗)�� �˸�, 𝑢𝑗 𝐠𝑗 = 𝐮 [12.3.15,16].
∘ 12.4 Tensor ���� ��ȯ ����: 𝐚 = 𝑢𝑖 𝐠𝑖 <- contavariant ���а� �ڿ� ���� vector�� �־��� ���
1) metric tensor ���ϱ�: ; 𝑔𝑖𝑗 = 𝐠𝑖 ∙ 𝐠𝑗
ex) ���� ��ǥ�� (𝑟, 𝜃, 𝑧)���� x = 𝑟 cos 𝜃, y = 𝑟 sin 𝜃, z = 𝑧 �� �� �ش� metric tensor 𝑔𝑖𝑗�� ���Ͻÿ�. ◂
⌈ 𝐠1 ⌉ ⌈ cos𝜃 sin𝜃 0 ⌉ ⌈ 𝐞1 ⌉
��𝐠2�� = �� -𝑟 sin 𝜃 𝑟 cos𝜃 0 �� ��𝐞2�� [12.1.8]
⌊ 𝐠3 ⌋ ⌊ 0 0 1 ⌋ ⌊ 𝐞3 ⌋
�� 𝐠1 = cos𝜃 𝐞1 + sin𝜃 𝐞2, 𝐠2 = -𝑟 sin𝜃 𝐞1 + 𝑟 cos𝜃 𝐞2, 𝐠3 = 𝐞3
𝑔11 = 𝐠1 ∙ 𝐠1 = (cos𝜃 𝐞1 + sin𝜃 𝐞2) ∙ (cos𝜃 𝐞1 + sin𝜃 𝐞2) = 1, ���� ������� ����� ����� �����,
metric tensor [𝑔𝑖𝑗] =
⌈ 1 0 0 ⌉
�� 0 𝑟2 0�� ▮ [12.1.9]
⌊ 0 0 1 ⌋
2) reciproca(��) metric tensor ���ϱ�: 𝑔𝑖𝑗 <- [𝑔𝑖𝑗] = [𝑔𝑖𝑗]-1 ��������� ����
ex) ���� ��ǥ�� (𝑟, 𝜃, 𝑧)�� ��쿡 �� metric tensor ���Ͻÿ�. ◂
reciprocal metric tensor [𝑔𝑖𝑗] =
⌈ 1 0 0 ⌉ -1 ⌈ 1 0 0 ⌉
��0 𝑟2 0�� = ��0 1/𝑟2 0�� ▮ [12.2.9]
⌊ 0 0 1 ⌋ ⌊ 0 0 1 ⌋
3) reciproca(��) ���� vector ���ϱ�: 𝐠𝑖 = 𝑔𝑖𝑗 𝐠𝑗
ex) ���� ��ǥ�� (𝑟, 𝜃, 𝑧)�� ��쿡 ������ vector 𝐠𝑖�� �����Ͻÿ�. ◂
𝐠1 = 𝑔11𝐠1 + 𝑔12𝐠2 + 𝑔13𝐠3 = 𝐠1 + 0 + 0 = 𝐠1 �� 𝐠1 = cos𝜃 𝐞1 + sin𝜃 𝐞2
𝐠2 = 𝑔21𝐠1 + 𝑔22𝐠2 + 𝑔23𝐠3 = 0 + (1/𝑟2 ) 𝐠2 + 0 + 0 = (1/𝑟2 ) 𝐠2 �� 𝐠2 = -(1/𝑟) sin𝜃 𝐞1 + (1/𝑟) cos𝜃 𝐞2
𝐠3 = 𝑔31𝐠1 + 𝑔32𝐠2 + 𝑔33𝐠3 = 0 + 0 + 𝐠3 = 𝐠3 �� 𝐠3 = 𝐞3 ▮ [12.2.4,5]
4) ��ȯ�� ���� ���ϱ�: 𝑢𝑖 = 𝑔𝑖𝑗 𝑢𝑗
5) ��ȯ�� tensor ������: 𝐮 = 𝑢𝑖 𝐠𝑖 <- covariant �� contravariant �� ��쿡�� ���� ������� ����˴ϴ�.
d) 12.5 Outer product(����)
∘ 𝐠𝑖 ⨯ 𝐠𝑗 �� 𝝐𝑖𝑗𝑘 𝐠𝑘, 𝐚 ⨯ 𝐛 = 𝑎𝑖𝑏𝑗 (𝐠𝑖 ⨯ 𝐠𝑗) = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗 𝐠𝑘 <- 𝝐𝑖𝑗𝑘: �Ϲ� ��ǥ���� ��ȯ ��ȣ [12.5.2,3]
∘ 𝐠𝑖 ⨯ 𝐠∣ �� 𝝐𝑖𝑗𝑘 𝐠𝑘, 𝐚 ⨯ 𝐛 = 𝑎𝑖𝑏𝑗 (𝐠𝑖 ⨯ 𝐠∣) = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗 𝐠k �� �Ϲ� ��ǥ���� vector�� ����: 𝐚 ⨯ 𝐛 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗 𝐠k or 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗 𝐠k [12.5.5,6]
e) 12.6 Triple inner product(���� ����)
(𝐚 ⨯ 𝐛) ∙ 𝐜 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗 𝐠𝑘 ∙ 𝑐𝑙 𝐠𝑙 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗𝑐𝑙 𝐠𝑘 ∙ 𝐠𝑙 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗𝑐𝑙 𝛿𝑘𝑙 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗𝑐𝑘 �� (𝐚 ⨯ 𝐛) ∙ 𝐜 = 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗𝑐𝑘 or 𝝐𝑖𝑗𝑘 𝑎𝑖𝑏𝑗𝑐𝑘 [12.6.1-3]
∘ Permutation symbol(��ȯ ��ȣ) ����: 𝝐𝑖𝑗𝑘 �� (𝐠𝑖 ⨯ 𝐠𝑗) ∙ 𝐠𝑘 <- 𝐄 = 𝝐𝑖𝑗𝑘 𝐠𝑖 ⊗ 𝐠𝑗 ⊗ 𝐠𝑘�� covariant ���� [12.6.5]
𝝐𝑖𝑗𝑘 =
⌈ 𝑉𝑔 (123, 231, 312)
�� -𝑉𝑔 (321, 132, 213) <- 𝑉𝑔: 3�� ���� vector��� �̷���� ��������ü�� ü�� [12.6.8]
⌊ 0 (223, 331 ��Ÿ)
∘ Reciprocal basis(������) vector <- �� 12.1 ����
𝐠1 ∙ 𝐠1 = 1, 𝐠1 ∙ 𝐠2 = 0, 𝐠1 ∙ 𝐠3 = 0, (<- Kronecker delta) �� 𝐠1 = 𝜆(𝐠2 ⨯ 𝐠3), 𝐠1 ∙ 𝐠1 = 𝜆(𝐠2 ⨯ 𝐠3) ∙ 𝐠1 = 𝜆𝑉𝑔 = 1, 𝜆 = 1/𝑉𝑔.
�� 𝐠1 = (𝐠2 ⨯ 𝐠3)/𝑉𝑔, 𝐠2 = (𝐠3 ⨯ 𝐠1)/𝑉𝑔, 𝐠3 = (𝐠1 ⨯ 𝐠2)/𝑉𝑔 [12.6.15-17]
∘ Reciprocal permutation symbol(����ȯ ��ȣ): 𝝐𝑖𝑗𝑘 �� (𝐠𝑖 ⨯ 𝐠𝑗) ∙ 𝐠𝑘 <- 𝐅 = 𝝐𝑖𝑗𝑘 𝐠𝑖 ⊗ 𝐠𝑗 ⊗ 𝐠𝑘�� contravariant ���� [12.6.26]
𝝐𝑖𝑗𝑘 =
⌈ 1/𝑉𝑔 (123, 231, 312)
��-1/𝑉𝑔 (321, 132, 213) <- 𝑉 𝑔: 3�� ���� vector��� �̷���� ��������ü�� ü�� [12.6.30]
⌊ 0 (223, 331 ��Ÿ)
f) 12.7 ������ ���� ����
∘ Permutation symbol(��ȯ ��ȣ) �����: 𝝐𝑖𝑗𝑘 = 𝑉𝑔 𝑒𝑖𝑗𝑘 <- Cartesian ��ǥ���� ��ȯ ��ȣ�� ��� ���� [12.7.1]
∘ Triple inner product(���� ����) ���� ����: (𝐠𝑖 ⨯ 𝐠𝑗 ∙ 𝐠𝑘)(𝐠p ⨯ 𝐠q ∙ 𝐠r) = 𝝐𝑖𝑗𝑘 𝝐𝑝𝑞𝑟 <- �� [6.5.25] ���� [12.7.2]
𝝐𝑖𝑗𝑘 𝝐𝑝𝑞𝑟 =
∣ 𝐠𝑖 ∙ 𝐠𝑝 𝐠𝑖 ∙ 𝐠𝑞 𝐠𝑖 ∙ 𝐠𝑟 ∣ ∣ 𝑔𝑖𝑝 𝑔𝑖𝑞 𝑔𝑖𝑟 ∣
∣ 𝐠𝑗 ∙ 𝐠𝑞 𝐠𝑗 ∙ 𝐠𝑞 𝐠j ∙ 𝐠r ∣ = ∣ 𝑔𝑗𝑝 𝑔𝑗𝑞 𝑔𝑗𝑟 ∣ = det [𝐠𝑖𝑗], 𝑔 �� det [𝐠𝑖𝑗] [12.7.4,5]
∣ 𝐠𝑘 ∙ 𝐠𝑝 𝐠𝑘 ∙ 𝐠𝑞 𝐠𝑘 ∙ 𝐠𝑟 ∣ ∣ 𝑔𝑘𝑝 𝑔𝑘𝑞 𝑔𝑘𝑟 ∣
basis vector (𝝐123)2 = det [𝐠] (𝑖,𝑗 = 1,2,3) = 𝑔, 𝝐123 = �� 𝑔 = 𝑉𝑔 �� 𝝐𝑖𝑗𝑘 = 𝑉𝑔 𝑒𝑖𝑗𝑘 = �� 𝑔 𝑒𝑖𝑗𝑘 [12.7.6-8]
∘ Reciprocal permutation symbol(����ȯ ��ȣ): 𝝐𝑖𝑗𝑘 = 𝐠𝑖 ⨯ 𝐠𝑗 ∙ 𝐠𝑘, 𝝐𝑖𝑗𝑘 = (1/�� 𝑔) 𝑒𝑖𝑗𝑘 <- ������ vector ���� [12.7.13-19]
g) 12.8 Eigenvalue(������) ����
(𝐀 - ��𝐈) ∙ 𝐱 = 0 ��: eigenvalue(������), 𝐱: eigenvector(���� vector) , 𝐈: identity vector(���� vector) [12.8.1]
det (𝐀 - ��𝐈) = 0 [12.8.2]
��3 - 𝐼 ��2 + 𝐼𝐼 ��2 - 𝐼𝐼𝐼 = 0 <- 𝐼, 𝐼𝐼, 𝐼𝐼𝐼: invariant scalars [12.8.3]
𝐼 = tr𝐀 = 𝐴𝑖.𝑖 𝐼𝐼 = 1/2{(tr𝐀 )2 - (tr(𝐀 2)} = 1/2 {(𝐴𝑖.𝑖 𝐴𝑗.𝑗 - 𝐴𝑖.𝑗 𝐴𝑖.𝑗)} 𝐼𝐼𝐼 = det 𝐀 = 𝑒𝑖𝑗𝑘 𝐴𝑖.1 𝐴𝑗.2 𝐴𝑘.3 [12.8.4-6]
|
|
|


















