|
�����
|
2019-06-16 16:50:51, ��ȸ�� : 1,118 |
- Download #1 : dff_1_1.jpg (47.4 KB), Download : 5

�߷�(gravity)�� �ð����� curvature * �־����� �����̶�� ���ν�Ÿ���� ��뼺�̷��� ���ظ� ���ؼ� ������ �ð���
�������� �̷����μ� �ľ��ϴ� ���� �� å�� �ñ����� ��ǥ�Դϴ�. �� �߿����� �ٷ� curvature�� ������ �Ǵ� �����Դϴ�.
curvature�� ������ 4���� �̻��� ���� ���������Ƿ�, Euclid 3���� ���� E3������ curvature�� ���� �����մϴ�.
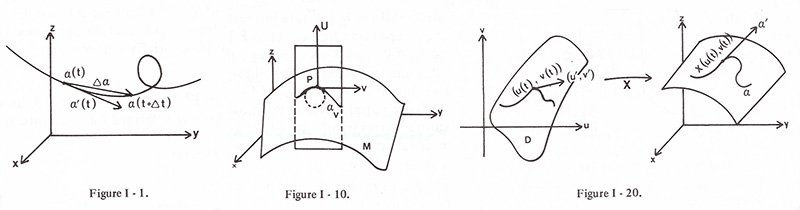
1. Curves ���� <- Figure I-1 ����
∘ 𝛂(t) = (x(t),y(t),z(t)) <- 𝛂: vector-valued fuction curve in 𝐄3, a �� t �� b, t: real variable parameter ��˿ܨ�
∘ 𝛂'(t) = (x'(t),y'(t),z'(t)) = lim𝛥��0 [𝛂(t + 𝛥t) - 𝛂(t))]/𝛥t <- 𝛂': derivative vector of curve 𝛂
∘ s(t) = ��at��𝛂'(u)��du <- s: arc length of curve 𝛂, t: time, ��𝛂'(u)��: instaneous speed ����, 𝛂': velocity vector
∘ 𝐋 = ��ab��𝛂'(u)��du <- 𝐋: total length of the entire curve 𝛂(t), a �� t �� b, 𝐈: interval
∘ 𝛂"(t) = (x"(t),y"(t),z"(t)) <- 𝛂": derivative of velocity vector 𝛂', 𝛂": acceleration vector
∘ 𝐓(s) = 𝛂'(s) <- t = s �� ds/dt = 1, 𝛂'(s) or 𝐓(s): unit tangent vector, 𝛂(s): unit speed curve
∘ 𝐓(s) ∙ 𝐓(s) = 1, �� 𝐓(s) ∙ 𝐓'(s) = 0 (<- by product rule) �� 𝐓(s)��𝐓'(s), 𝛂"(s) or 𝐓'(s): curvature vector
∘ Definition I-1
k(s) = ��𝐓'(s)��= ��𝛂"(s)��
k(s)�� ��Ī�Ǵ� � 𝛂�� 𝛂(s)������ curvature ������ 𝐓'(s)�� �����̴�.
∘ 𝐍(s) = 𝐓'(s)/��𝐓'(s)��= 𝐓'(s)/k(s). �� 𝐓'(s) = k(s)𝐍(s) <- 𝐍(s): principal normal vector
∘ c(s) = 𝛂(s) + [1/k(s)]/𝐍(s) <- 𝛂(s): � 𝛂���� tangent point, c(s): center of curvature
osculating circle �����: ������ 1/k(s), �߽� c(s)�� ��, osculating plane: 𝐓(s)�� 𝐍(s)�� ���
∘ 𝐁 = 𝐓 X 𝐍 <- binormal vector of the unit length: osculating plane�� ������ vector
𝐁' = (𝐓 X 𝐍)' = 𝐓' X 𝐍 + 𝐓 X 𝐍' = 0 + 𝐓 X 𝐍'= 𝐓 X 𝐍' (�� 𝐓'= k𝐍)
𝐍 = 𝐁 X 𝐓, 𝐓 = 𝐍 X 𝐁, 𝐍��𝐁, 𝐍��𝐍', 𝐁'��𝐁, 𝐁'��𝐍' �� 𝐁' ��𝐍
∘ 𝐁' = - 𝜏𝐍 <- 𝜏 = 𝜏(s): torsion ��Ʋ��(����) �Լ��μ� osculating plane�� turning rate(��� ����)�� ������.
∘ 𝐓' = k𝐍, 𝐍' = - k𝐓 + 𝜏𝐁, 𝐁' = - 𝜏𝐍 <- the Formulas of Frenet
���� �����ϰ� ����� �̻��� ������� ����� �����Ѵٸ� �츮�� 3���������� ������ ��� �ؼ�/������ �� �ֽ��ϴ�.
2. Gauss Curvature I <- Figure I-10 ����
∘ �Ų�����(smooth) ���(surface) 𝐌 �� 𝐄3�� ������ �� 𝐏�� unit normal vector�� 𝐔��� �մϴ�. �̶� 𝐯�� �� 𝐏����
𝐌�� ���ϴ� unit vector���, �� 𝐯�� �����ϴ� 𝛂𝐯 ��� �ִ� 𝐌�� 𝐏���� �����ϴ� ����� 𝐯�� 𝐔�� ���� �����˴ϴ�.
���� �츮�� 𝛂𝐯�� ��� 𝐌�� �� 𝐏������ normal section in the 𝐯 direction �̶�� �θ��ϴ�.
∘ 𝐤n(𝐯) = ∓1/ 𝐑(𝐯) <- 𝐑(𝐯): osculating circle �ݰ�, 𝐤n(𝐯): 𝐌�� 𝐏���� normal curvature in the 𝐯 direction
𝛂𝐯�� principal normal vector�� surface normal vector�� 𝐔�� ������ �����ϸ� +, �ݴ��̸� -, curvature�� 0�̸� 0.
∘ Gauss curvature 𝐊 (𝐌�� 𝐏����)��?
𝐊(𝐏) = 𝐤1 𝐤2 <- 𝐯1: tangent vector in a principal direction 𝐤1: maxinmum value of 𝐤n(𝐯),
𝐯2: tangent vector in a principal direction 𝐤2: minimum value of 𝐤n(𝐯), 𝐯1 and 𝐯1: �� ������.
ex1) 𝐊 in a cylinder: (�ݰ� R�� ���) 𝐤1= 1/R, 𝐤2= 0 �� 𝐊 = 0
ex2) 𝐊 in a sphere: (�ݰ� R�� ���) 𝐤n(𝐯) = ∓1/R2
ex3) 𝐊 in a sddle-shaped surface: z = 1/2(y2 - x2), 𝐊 < 0
ex4) 𝐊 in a torus: 𝐊 > 0 on outside surface, 𝐊 > 0 on inside surface, 𝐊 = 0 on two circle of top and bottom
Curvature�� intrinsic Ү��� ǥ�� ���п� �Ϲݻ�뼺������ 4���� �ð��� curvature�� ������ �� �ֽ��ϴ�.
Gauss�� Therema Egregium (��� ����)�� ������ �̷�� ��� �̷� ���п� intrinsic ǥ�Ⱑ �����������ϴ�.
intrinsic�� curvature�� �����ȭ�� �������� manifold �������� 'curved space'�� �Ϲ�ȭ�� �� �ְ� �մϴ�.
3. Surfaces ���� in E3 <- Figure I-20 ����
∘ ��� 𝐌�� 𝓡2�� open subset 𝐃�� ���ǵ� �ΰ� ������ vector �Լ� 𝐗:𝐃 �� E3�� image�� locally(���������) ǥ�� ����
𝐗 = 𝐗(u,v) = (x(u,v), y(u,v), z(u,v)) [3-2]
∘ ���ǻ� �츮�� �� �Լ��� 𝐃���� �ּ� �������� �̺��� �� ������, 𝐗�� regular �������� ���� ������ ���
𝐗1(u, v) = ��𝐗/��u = (��x/��u, ��y/��u, ��z/��u)
𝐗2(u, v) = ��𝐗/��v = (��x/��v, ��y/��v, ��z/��v)
��� �� vector�� 𝐃�� �� (u,v)�� ���� linearlly independnt(���� Լء)�Ͽ���, 𝐗1 X 𝐗2 �� 0 in 𝐃.
∘ �Ϲ������� regularity(������)�� 𝐃�� �� ������ neighborhood(��ۨ) 𝛺�� ������, �̿� ���� �Լ� 𝐗��
�������� inverse function(����) 𝐗(𝛺) �� 𝛺 �� ���� one-to-one(������)�� ���踦 �����մϴ�. ����
�̷��� ������ system of curvillinear coordinate(���� ���ͧ) u, v on 𝐗(𝛺) �� 𝐌���� ������ �� �ֽ��ϴ�.
∘ 𝛂(t) = 𝐗 (u(t), v(t)) <- 𝐃���� u(t), v(t)�� smooth ��̸�, 𝐗�� ���� image�� 𝐌���� 𝛂�� smooth �
𝛂'(t) = (��𝐗/��u)(du/dt) + (��𝐗/��v)(dv/dt) <- by chain rule
𝛂'(t) = u'𝐗1 + v'𝐗2 <- in abbriviated notation [3-3]
∘ Definition I-2
𝐌���� 𝐏�� ����ϴ� ��� velociy vector 𝐯�� 𝐏�� ������, vector 𝐯�� 𝐏���� 𝐌������ tangent vector �� �θ���.
𝐏���� 𝐌������ ��� tangent vector�� ������ 𝐏���� 𝐌�� tangent plane ��� �θ���, 𝐓p𝐌���� ǥ���Ѵ�.
∘ 𝐏������ � tangent vector 𝐗(u0, v0)�� 𝐗1(u0, v0)�� 𝐗1(u0, vo)�� �� linear combination�Դϴ�.
�Ųٷ� �Ǽ� a, b���� linear combination 𝐯 = (a𝐗1 + b𝐗2)(u0, v0)�� 𝐌�� �ִ� �� ��� velocity vector�Դϴ�.
���� ��� 𝛂(t) = 𝐗(u0+ at, v0+ bt)�� 𝛂'(0) = 𝐯 �� �����ϴ�. ���� regurality(������) of 𝐗�� 𝐓p𝐌��
𝐗1�� 𝐗2�� basis(����)�� �ϴ� �� �� 𝐏������ 2-dimensional vector space�� �ǹ��ϴ� ���Դϴ�.
�̶� 𝐗1(u0, v0)�� 𝐗2(u0, v0)�� �� �ڽ��� �� ��� velocity vectors
u�� 𝐗 (u, v0) (v = v0, fixed) <- u-parameter curve
v�� 𝐗 (u0, v) (u = u0, fixed) <- v-parameter curve
p.s. Richard L. Faber Differential Geometry and Relativity Theory (Marcel Deckker 1983) Chapter I.
�̺б����а� ��뼺 ������ ������ �� ����� ���б� ���а�/�����а� ���г������ ������� ���ʵǾ��� ��.
���� GRå���� ���� ���ٰ� ������ rigor�� ������ �ʿ��� ���� ���� ������ å���� �����Ǿ� �����Ͽ���.
* curvature�� ���ƿ� ���� �־��� ��ü�� �ǹ��ϰų� ����� ��Ī |
|
|


















